



Gear Motor N20 con Reductora para Arduino y Robótica

$11.50 IVA incluido
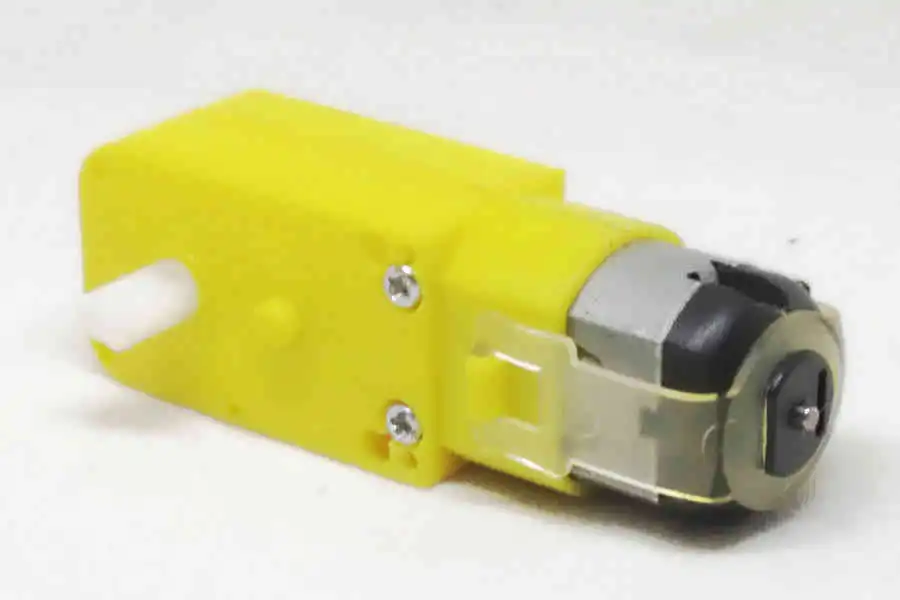
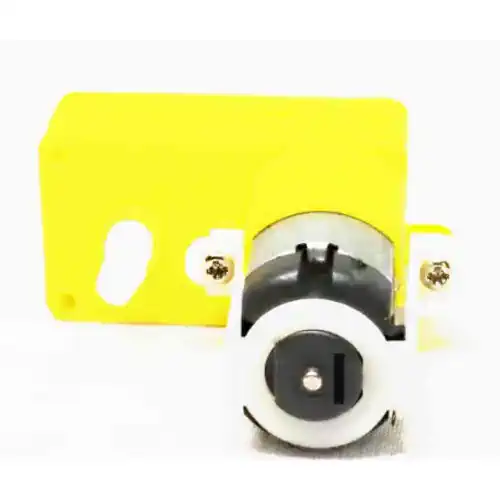
Motor N20 con engranajes metálicos
El Gear Motor N20 con reductora es un micro motor DC de alto rendimiento, compacto y versátil, ideal para proyectos de Arduino, robótica, mecatrónica y automatización. Gracias a su caja de engranajes metálicos, ofrece fuerza, precisión y durabilidad en aplicaciones donde se necesita bajo consumo y torque confiable.
23 disponibles
📖 Descripción completa Gear Motor N20
El Gear Motor N20 es uno de los motores reductores más utilizados en proyectos de robótica y electrónica gracias a su tamaño reducido, bajo consumo y alto torque.
Este pequeño pero poderoso motor está diseñado con una caja reductora metálica que permite ajustar su velocidad y aumentar su fuerza de arrastre, haciéndolo perfecto para mover ruedas de robots, mecanismos de precisión, cerraduras electrónicas, impresoras 3D, carros inteligentes, y todo tipo de proyectos educativos y profesionales.
Su estructura compacta permite montarlo en espacios reducidos, y su gran variedad de relaciones de reducción lo convierten en una solución flexible para distintas necesidades: desde alta velocidad con bajo torque hasta baja velocidad con alto torque.
Además, es totalmente compatible con controladores, drivers y placas Arduino, por lo que resulta muy fácil integrarlo en proyectos de robótica educativa y prototipos electrónicos.
En definitiva, el Gear Motor N20 con reductora es el aliado perfecto si buscas fiabilidad, potencia y versatilidad en un formato miniatura.
🧩 Características Generales del Motor N20
| Atributo | Valor típico |
| Tensión nominal | 3V – 6V DC (algunos modelos hasta 12V) |
| Corriente sin carga | ~40 mA – 100 mA |
| Corriente con carga | 150 mA – 500 mA |
| Corriente de arranque | Hasta 1.5 A (depende de la carga) |
| Velocidad sin carga | 30 – 1000 RPM (según la relación de engranaje) |
| Torque | Hasta 1.2 kg·cm (varía según RPM) |
| Tipo de eje | Simple o doble eje (eje de 3 mm) |
| Dimensiones del motor | 12 mm × 10 mm × 15 mm (sin caja reductora) |
| Caja reductora (gearbox) | 10 mm × 12 mm × 9 mm |
| Peso | 10 – 15 g |
⚙️ Relaciones de Reducción Disponibles
- 6:1 – muy rápido, poco torque
- 30:1 – equilibrio entre velocidad y fuerza
- 50:1 – común para pequeños robots
- 100:1 o más – lento, pero con mucho torque
⚡ Conexión y Control
Se puede controlar con transistores, puentes H (como L298N, L9110, DRV8833) o drivers PWM.
- Compatible con Arduino, ESP32, Raspberry Pi, etc.
- Puede usarse con encoders si se requiere retroalimentación.
⚙️ ¿Qué es el N20 exactamente?
Es un motor de corriente directa (DC) acoplado a una caja reductora metálica, que reduce la velocidad de salida y aumenta el torque. Se lo conoce como “N20” por sus dimensiones estándar. Existen versiones de eje simple y eje doble (para usar con encoders).
🔌 Conexión típica
Puedes conectar el Gear motor n20 a través de un driver de motor, por ejemplo:
- L298N (para 2 motores)
- L9110 (compacto y de bajo consumo)
- TB6612FNG (más eficiente y moderno que L298N)
🔧 Proyectos populares con motor N20
- Mini robot seguidor de línea
- Usa dos Gear motor n20, sensores infrarrojos y una placa como Arduino Nano o ESP32.
- Robot rastreador o Evitador de obstáculos
- Con sensores ultrasónicos (HC-SR04) y dos N20 para movilidad.
- Cerradura electrónica con engranajes
- El N20 gira un sistema de engranajes o perno para abrir/cerrar.
- Trampas o mecanismos automáticos
- Pequeños mecanismos de puertas, compuertas o dispensadores.
- Brazo robótico o actuador lineal casero
- Control de movimientos pequeños con alto torque.
- Vehículos solares o de bajo consumo
- Su bajo peso y consumo lo hacen ideal para pequeños autos solares.
🤖 Robot seguidor de línea con motores N20
🧰 Materiales
- 2x Motores N20 con ruedas
- 1x Chasis liviano (o impreso en 3D)
- 1x L9110 o TB6612FNG (driver de motor)
- 1x Arduino Nano (o Uno, o ESP32)
- 2x Sensores de línea TCRT5000 o módulo QTR
- 1x Porta baterías (3.7V – 7.4V según tu driver)
- 1x Batería Li-ion o pack de pilas
- Cables dupont, interruptor
🧠 Lógica básica
- Los sensores detectan si hay línea negra (valor bajo).
- Si el sensor izquierdo detecta línea: gira a la izquierda.
- Si el derecho detecta línea: gira a la derecha.
- Si ambos detectan: sigue recto.
🛠️ Código Arduino básico (resumen)
// Pines del motor
#define IN1 3
#define IN2 4
#define IN3 5
#define IN4 6
// Pines sensores
#define SENSOR_IZQ A0
#define SENSOR_DER A1
void setup() {
pinMode(IN1, OUTPUT); pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT); pinMode(IN4, OUTPUT);
pinMode(SENSOR_IZQ, INPUT);
pinMode(SENSOR_DER, INPUT);
}
void loop() {
int izq = analogRead(SENSOR_IZQ);
int der = analogRead(SENSOR_DER);
if (izq < 500 && der < 500) adelante();
else if (izq < 500) izquierda();
else if (der < 500) derecha();
else detener();
}
void adelante() {
digitalWrite(IN1, HIGH); digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH); digitalWrite(IN4, LOW);
}
void izquierda() {
digitalWrite(IN1, LOW); digitalWrite(IN2, HIGH);
digitalWrite(IN3, HIGH); digitalWrite(IN4, LOW);
}
void derecha() {
digitalWrite(IN1, HIGH); digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW); digitalWrite(IN4, HIGH);
}
void detener() {
digitalWrite(IN1, LOW); digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW); digitalWrite(IN4, LOW);
}
🔐 Cerradura automática con motor N20
🧰 Materiales
- 1x Gear motor n20 con engranaje o sistema de leva
- 1x Driver L9110 o relé doble
- 1x Microcontrolador (Arduino, ESP32, etc.)
- 1x Sensor RFID, teclado matricial o lector de huella
- 1x Fuente o batería de 5V
- 1x Mecanismo de traba impresa o artesanal
🧠 Lógica básica
- El microcontrolador recibe una clave correcta (por teclado, RFID, etc.).
- Activa el motor N20 por unos segundos para girar una leva o pestillo.
- Luego, detiene el motor o invierte la dirección para cerrar.
#define IN1 3
#define IN2 4
bool abierto = false;
void setup() {
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
// iniciar sensor RFID, teclado, etc.
}
void loop() {
if (claveCorrecta()) {
if (!abierto) abrir();
else cerrar();
abierto = !abierto;
delay(500); // Evita múltiples lecturas
}
}
void abrir() {
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
delay(1000); // Girar motor 1 segundo
detener();
}
void cerrar() {
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
delay(1000);
detener();
}
void detener() {
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
}
💡 Razones para comprar el Gear Motor N20
✔️ Compacto y ligero, ideal para proyectos con espacio reducido.
✔️ Alto torque gracias a la reductora metálica.
✔️ Compatible con Arduino y controladores de motores.
✔️ Duradero y confiable en aplicaciones continuas.
✔️ Disponible en distintas RPM para adaptarse a tu necesidad.
✔️ Precio accesible para estudiantes y makers.
✔️ Perfecto para robótica educativa, prototipos y proyectos profesionales.
❓ Preguntas frecuentes (FAQ)
🔹 ¿Qué voltaje debo usar para el Gear Motor N20?
Funciona entre 3V y 12V, siendo 6V a 12V lo más recomendado para un mejor rendimiento.
🔹 ¿Necesito un driver para controlarlo con Arduino?
Sí, se recomienda un driver de motores como el L298N o el TB6612FNG para controlar la dirección y velocidad.
🔹 ¿Puedo usar el Gear Motor N20 para un robot seguidor de línea?
¡Claro! Es uno de los usos más comunes junto con ruedas pequeñas.
🔹 ¿El engranaje es plástico o metálico?
Los N20 de calidad suelen traer engranajes metálicos, lo que garantiza mayor durabilidad.
🔹 ¿Cuántas versiones de RPM existen?
Depende del fabricante, pero normalmente hay desde 30 RPM hasta 600 RPM.
📌 Conclusión
El Gear Motor N20 con reductora para Arduino y robótica es la opción perfecta si buscas un motor pequeño, potente y confiable para tus proyectos. Gracias a su caja reductora metálica y compatibilidad con placas de desarrollo, se ha convertido en el estándar en la robótica educativa y prototipado electrónico.
👉 Compra ahora tu Gear Motor N20 y lleva tus proyectos al siguiente nivel con la mejor relación calidad-precio.
🚚 Métodos de envío
📦 Envíos a nivel nacional con empresas de mensajería confiables.
🚀 Entrega rápida en 24-48 horas en principales ciudades.
🔒 Embalaje seguro para proteger el motor durante el transporte.
💳 Formas de pago
💵 Pago contra entrega (según disponibilidad en tu zona).
🏦 Transferencias bancarias y depósitos.
| Peso | 0.010 kg |
|---|---|
| Dimensiones | 2.5 × 1.20 × 1 cm |
Productos relacionados

Moto Reductores

Moto Reductores