


⚙️ Motor Reductor 12V para Arduino y Robótica

$4.80 IVA incluido
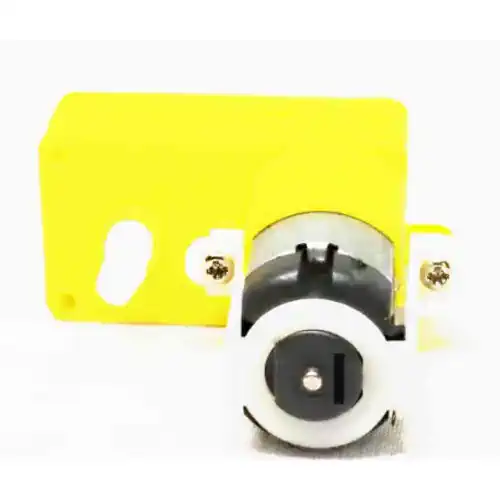
Motor DC 12V con caja reductora
,El Motor Reductor 12V para Arduino y Robótica combina alta potencia, bajo consumo y precisión mecánica, ideal para proyectos DIY, automatización y educación. Su caja de engranajes metálica ofrece torque impresionante a bajas revoluciones, siendo perfecto para carros robot, brazos mecánicos y mecanismos de movimiento. ¡Fácil de integrar y compatible con microcontroladores!
📌 Descripción General del Motor Reductor 12V
Un motor reductor de corriente directa es un motor DC acoplado a una caja reductora (engranaje), que reduce las revoluciones por minuto (RPM) a cambio de mayor torque (fuerza de giro). Esto lo hace ideal para aplicaciones que requieren fuerza en lugar de velocidad.
⚙️ Datos Técnicos del Motor Reductor 12V – Especificaciones que Impresionan
(Estas pueden variar según el modelo, pero son comunes para motores pequeños usados en robótica o electrónica)
- Voltaje de operación: 3V a 6V DC
- Corriente sin carga: ~100 mA
- Corriente con carga: ~250 mA a 500 mA
- Velocidad (RPM): 30 – 300 RPM (según la relación de reducción)
- Torque: 0.5 – 3 kg·cm (dependiendo del modelo)
- Tipo de eje: Doble eje / eje simple (usado para codificadores o ruedas)
- Tipo de caja reductora: Plástica o metálica (más resistente)
- Relación de engranaje: 1:48, 1:120, 1:200, etc.
⚡ Conexión Eléctrica
- Polaridad directa: el eje gira en un sentido.
- Polaridad inversa: el eje gira en sentido contrario.
- Puede ser controlado con un puente H o un módulo controlador tipo L298N o L9110S.
🛠️ Aplicaciones Comunes
- Mini robots móviles (line followers, sumo)
- Vehículos teledirigidos
- Puertas automáticas
- Proyectos Arduino o microcontroladores
- Grúas, mecanismos elevadores, etc.
🧠 Ventajas
- Bajo consumo de energía
- Fácil de controlar
- Compacto y económico
- Aumento de torque gracias a la caja reductora
- Reversible (puede girar en ambos sentidos)
📏 Dimensiones Comunes
(Ejemplo para motor amarillo típico con caja plástica)
- Largo total: 70 mm
- Ancho: 23 mm
- Altura: 18 mm
- Diámetro del eje: 5 mm (forma D)
- Longitud del eje: 10 mm
🔩 Proyectos Donde Se Usa un Motor Reductor DC
🤖 Robótica
- Robot seguidor de línea: Detecta una línea negra en el suelo y la sigue.
- Robot sumo: Empuja a otros robots fuera de un ring.
- Robot esquiva-obstáculos: Cambia de dirección al detectar objetos.
- Brazos robóticos: Permite el movimiento de articulaciones con torque suficiente.
- Robot explorador 4 ruedas (4WD): Vehículo controlado o autónomo para exploración o competencia.
🛠️ Automatización y Makers
- Puertas automáticas: Movimiento de apertura/cierre en miniaturas o prototipos.
- Dispositivos dispensadores: Como dispensadores de comida, pastillas o alcohol gel.
- Cintas transportadoras: Para clasificar o mover objetos pequeños.
- Ventanas automáticas: Para proyectos de domótica.
- Mecanismos de elevación: Como montacargas o grúas pequeñas.
🚗 Vehículos
- Carros controlados por Bluetooth o RF: Usando Arduino, ESP32, etc.
- Vehículos solares: Propulsados por energía solar.
- Tanques con orugas: Con estructura impresa en 3D o con kits listos.
🎮 Proyectos con Control Remoto
- Mini grúas: Para levantar y mover objetos con precisión.
- Puentes levadizos: Para juegos de construcción o modelos a escala.
- Trampas automatizadas: En juegos de escape o entretenimiento interactivo.
🎓 Educación y Demostraciones
- Demostraciones de torque vs. velocidad: Para enseñar conceptos de física o ingeniería.
- Proyectos escolares de tecnología: Robots sencillos con baterías y ruedas.
- Concursos de innovación y ciencia: Para prototipos funcionales.
📘 ¿Qué es un Motor Reductor de Corriente Directa (DC)?
Motor Reductor 12V DC combina un motor eléctrico de corriente continua con una caja de engranajes reductora, lo que permite:
- Reducir la velocidad de giro (RPM)
- Aumentar el torque (fuerza de giro)
Esto es útil cuando se necesita fuerza en lugar de velocidad, por ejemplo en un robot o un brazo mecánico.
⚙️ Tipos de Motores Reductores DC (según aplicación)
| Tipo de caja | Material | Aplicación ideal |
| Plástica | Ligera | Proyectos educativos y robots livianos |
| Metálica | Resistente | Automatización y robótica con carga |
| Angular (en L) | Compacta | Espacios reducidos |
| Doble eje | Versátil | Codificadores o sincronización con ruedas |
🧠 Cómo elegir un motor reductor DC
- Voltaje compatible (ej. 3V, 6V, 12V)
- RPM necesarias (más RPM = más velocidad, menos torque)
- Torque requerido (para mover peso o subir inclinaciones)
- Tamaño del eje (que se ajuste a ruedas, engranajes, etc.)
- Relación de reducción (ej. 1:48, 1:100, 1:200)
🔌 Control y programación
Los Motor Reductor 12V DC se pueden controlar con:
- Puente H L298N o L9110S para invertir giro y velocidad
- Microcontroladores como Arduino, ESP32, etc.
- Modulación por ancho de pulso (PWM) para variar la velocidad
🧪 Ejemplo básico de conexión (Arduino + L298N)
Componentes:
- 2 motores reductores DC
- Módulo L298N
- Arduino UNO
- Fuente de 6V o 12V
// Pines de control
int IN1 = 7;
int IN2 = 6;
int ENA = 5; // PWM
void setup() {
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(ENA, OUTPUT);
}
void loop() {
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
analogWrite(ENA, 180); // Velocidad
}
📊 Relación RPM vs Torque (aproximado)
| Relación de Reducción | RPM | Torque |
| 1:48 | 200 | Bajo |
| 1:100 | 100 | Medio |
| 1:200 | 50 | Alto |
Conoce el Motor Reductor, ideal para robots, carros inteligentes y mecanismos compactos.
✅ Alto torque
✅ Bajo consumo
✅ Montaje en ángulo perfecto
❓ Preguntas Frecuentes sobre el Motor Reductor 12V
❓ ¿Puedo usar este motor directamente con Arduino?
No directamente, necesitas un driver (como L298N o L9110). Arduino no entrega la corriente necesaria.
❓ ¿Cuál es la mejor fuente de alimentación?
Una fuente de 12V DC o una batería de 7.4V a 12V según el torque deseado. Verifica que soporte el amperaje del motor.
❓ ¿Es reversible?
Sí. Invirtiendo la polaridad de la alimentación, puedes cambiar la dirección de giro.
❓ ¿Se puede controlar la velocidad?
Sí, usando modulación por ancho de pulso (PWM) desde Arduino o un controlador.
🛒 6 razones Exclusivas para Comprar este Motor Reductor Hoy Mismo
- 🔋 Alta eficiencia energética – Ideal para proyectos con baterías.
- 🧠 Compatible con Arduino y otros microcontroladores.
- 🏗️ Construcción robusta y engranajes duraderos.
- ⚡ Par alto a bajas revoluciones, justo lo que necesitas para precisión.
- 🛠️ Fácil de integrar en protoboards, PCBs o chasis mecánicos.
- 🧰 Versatilidad asombrosa para todo tipo de automatización DIY.
🎁 Envío Rápido
- 🚚 Envíos a nivel nacional con empresas de logística confiables.
- 🕒 Entrega rápida en 24 a 72 horas hábiles.
- 📦 Empaque seguro y seguimiento en tiempo real.
💳 Formas de Pago 100% Seguras y Rápidas
- 💵 Transferencias bancarias y depósitos
- 🧾 Pagos contra entrega en ciudades seleccionadas
🔒 Tus pagos están protegidos con cifrado SSL y certificados de seguridad de alto nivel.
| Peso | 0.03 kg |
|---|
Productos relacionados


Moto Reductores

Moto Reductores