




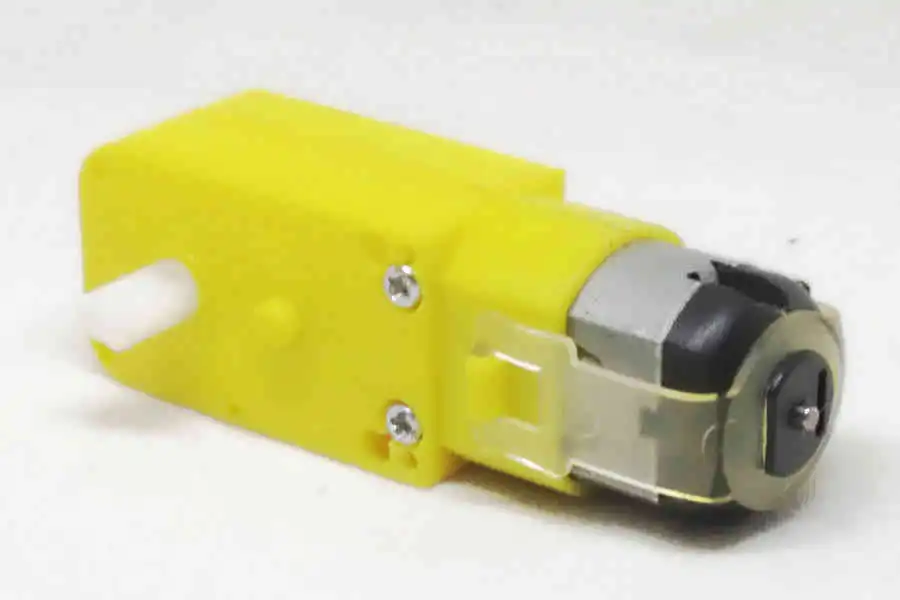
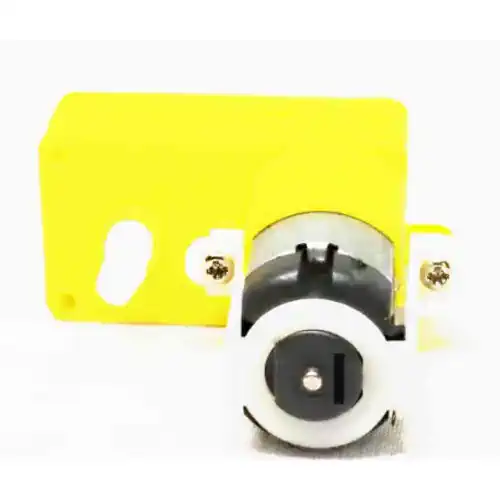
Gear motor n20
El motorreductor N20, comúnmente conocido como “motor N20”, es un motor de corriente continua (DC) pequeño con un engranaje reductor (gearbox) incorporado. Es muy popular en robótica, proyectos DIY (hazlo tú mismo), automatización y sistemas embebidos por su tamaño compacto, bajo consumo de energía y facilidad de control.
Sobre este artículo
- Gear motor n20 de DC 3V/6V12V N20 del motor de engranaje GA12-N20
- Gran reemplazo para el motor de engranajes de CC oxidado o dañado en la máquina.
- Artesanía fina, duradera, no fácil de llevar, peso ligero, alto par y bajo RPM.
- Velocidad de rotación múltiple opcional, cumpliendo diferentes requisitos funcionales.
Descripción del producto
Este es motor de reducción de alta calidad GA12-N20 N20 Motor de engranaje DC 3V/6V12V N20, el mini motor de engranajes de CC es pequeño y ligero para montar fácilmente una rueda en el eje de salida del motor o la hoja del helicóptero. Es un gran reemplazo para el motor de engranajes de CC oxidado o dañado en la máquina. Artesanía fina, duradera, no fácil de llevar, peso ligero, alto par y bajo RPM.
🧩 Características Generales del Motor N20
| Atributo | Valor típico |
| Tensión nominal | 3V – 6V DC (algunos modelos hasta 12V) |
| Corriente sin carga | ~40 mA – 100 mA |
| Corriente con carga | 150 mA – 500 mA |
| Corriente de arranque | Hasta 1.5 A (depende de la carga) |
| Velocidad sin carga | 30 – 1000 RPM (según la relación de engranaje) |
| Torque | Hasta 1.2 kg·cm (varía según RPM) |
| Tipo de eje | Simple o doble eje (eje de 3 mm) |
| Dimensiones del motor | 12 mm × 10 mm × 15 mm (sin caja reductora) |
| Caja reductora (gearbox) | 10 mm × 12 mm × 9 mm |
| Peso | 10 – 15 g |
⚙️ Relaciones de Reducción Disponibles
- 6:1 – muy rápido, poco torque
- 30:1 – equilibrio entre velocidad y fuerza
- 50:1 – común para pequeños robots
- 100:1 o más – lento, pero con mucho torque
⚡ Conexión y Control
Se puede controlar con transistores, puentes H (como L298N, L9110, DRV8833) o drivers PWM.
- Compatible con Arduino, ESP32, Raspberry Pi, etc.
- Puede usarse con encoders si se requiere retroalimentación.
⚙️ ¿Qué es el N20 exactamente?
Es un motor de corriente directa (DC) acoplado a una caja reductora metálica, que reduce la velocidad de salida y aumenta el torque. Se lo conoce como “N20” por sus dimensiones estándar. Existen versiones de eje simple y eje doble (para usar con encoders).
🔌 Conexión típica
Puedes conectar el Gear motor n20 a través de un driver de motor, por ejemplo:
- L298N (para 2 motores)
- L9110 (compacto y de bajo consumo)
- TB6612FNG (más eficiente y moderno que L298N)
🔧 Proyectos populares con motor N20
- Mini robot seguidor de línea
- Usa dos Gear motor n20, sensores infrarrojos y una placa como Arduino Nano o ESP32.
- Robot rastreador o evitador de obstáculos
- Con sensores ultrasónicos (HC-SR04) y dos N20 para movilidad.
- Cerradura electrónica con engranajes
- El N20 gira un sistema de engranajes o perno para abrir/cerrar.
- Trampas o mecanismos automáticos
- Pequeños mecanismos de puertas, compuertas o dispensadores.
- Brazo robótico o actuador lineal casero
- Control de movimientos pequeños con alto torque.
- Vehículos solares o de bajo consumo
- Su bajo peso y consumo lo hacen ideal para pequeños autos solares.
🤖 Robot seguidor de línea con motores N20
🧰 Materiales
- 2x Motores N20 con ruedas
- 1x Chasis liviano (o impreso en 3D)
- 1x L9110 o TB6612FNG (driver de motor)
- 1x Arduino Nano (o Uno, o ESP32)
- 2x Sensores de línea TCRT5000 o módulo QTR
- 1x Porta baterías (3.7V – 7.4V según tu driver)
- 1x Batería Li-ion o pack de pilas
- Cables dupont, interruptor
🧠 Lógica básica
- Los sensores detectan si hay línea negra (valor bajo).
- Si el sensor izquierdo detecta línea: gira a la izquierda.
- Si el derecho detecta línea: gira a la derecha.
- Si ambos detectan: sigue recto.
🛠️ Código Arduino básico (resumen)
// Pines del motor
#define IN1 3
#define IN2 4
#define IN3 5
#define IN4 6
// Pines sensores
#define SENSOR_IZQ A0
#define SENSOR_DER A1
void setup() {
pinMode(IN1, OUTPUT); pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT); pinMode(IN4, OUTPUT);
pinMode(SENSOR_IZQ, INPUT);
pinMode(SENSOR_DER, INPUT);
}
void loop() {
int izq = analogRead(SENSOR_IZQ);
int der = analogRead(SENSOR_DER);
if (izq < 500 && der < 500) adelante();
else if (izq < 500) izquierda();
else if (der < 500) derecha();
else detener();
}
void adelante() {
digitalWrite(IN1, HIGH); digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH); digitalWrite(IN4, LOW);
}
void izquierda() {
digitalWrite(IN1, LOW); digitalWrite(IN2, HIGH);
digitalWrite(IN3, HIGH); digitalWrite(IN4, LOW);
}
void derecha() {
digitalWrite(IN1, HIGH); digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW); digitalWrite(IN4, HIGH);
}
void detener() {
digitalWrite(IN1, LOW); digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW); digitalWrite(IN4, LOW);
}
🔐 Cerradura automática con motor N20
🧰 Materiales
- 1x Gear motor n20 con engranaje o sistema de leva
- 1x Driver L9110 o relé doble
- 1x Microcontrolador (Arduino, ESP32, etc.)
- 1x Sensor RFID, teclado matricial o lector de huella
- 1x Fuente o batería de 5V
- 1x Mecanismo de traba impresa o artesanal
🧠 Lógica básica
- El microcontrolador recibe una clave correcta (por teclado, RFID, etc.).
- Activa el motor N20 por unos segundos para girar una leva o pestillo.
- Luego, detiene el motor o invierte la dirección para cerrar.
#define IN1 3
#define IN2 4
bool abierto = false;
void setup() {
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
// iniciar sensor RFID, teclado, etc.
}
void loop() {
if (claveCorrecta()) {
if (!abierto) abrir();
else cerrar();
abierto = !abierto;
delay(500); // Evita múltiples lecturas
}
}
void abrir() {
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
delay(1000); // Girar motor 1 segundo
detener();
}
void cerrar() {
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
delay(1000);
detener();
}
void detener() {
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
}
| Peso | 0.010 kg |
|---|---|
| Dimensiones | 2.5 × 1.20 × 1 cm |
Productos relacionados

Moto Reductores

Moto Reductores