
Carro 4×4 Arduino

$34.99 IVA incluido
4WD CAR CHASSIS KIT
¡Perfecto! Un chasis Carro 4×4 Arduino (4 ruedas motrices) es una gran opción si quieres más potencia, estabilidad y capacidad de carga que un 2WD. Es ideal para proyectos más exigentes, terrenos irregulares, o si planeas usar más sensores o baterías pesadas.
Kit de chasis de Carro 4×4 Arduino inteligente de 2 capas
- √DC 6V 4 ruedas Robot Smart Carro 4×4 Arduino Chasis Kits coche con codificador de velocidad.
- √ Utiliza cuatro curvas de máquina de corriente continua de desaceleración para ser ágil, la directividad es buena. Cuatro actuaciones, plenitud de caballos de fuerza. El chasis grande y estable muy fácil de expandir.
- √ Para obtener experiencia práctica sobre robótica y puede extender el sistema electrónico como Raspberry Pi, etc. para realizar la función de rastreo, evitación de obstáculos, pruebas de distancia, pruebas de velocidad, control remoto inalámbrico.
- √ Con una plataforma de automóvil, agrega algunos módulos de microcontrolador y sensor, y prográmelo. Entonces hiciste tu propio auto robot.
- √ La estructura mecánica es simple, muy fácil de instalar, ideal para bricolaje.
🧰 ¿Qué incluye típicamente un chasis 4WD básico?
- 1 estructura de acrílico o metal.
- 4 motores DC con caja reductora.
- 4 ruedas con goma.
- Rueda loca o estabilizadora (a veces).
- Soporte para baterías (AA o 18650).
- Cables y tornillos.
- Compatible con controladores como L298N o L9110S.
✅ Ventajas del 4WD:
- Mejor tracción y control.
- Más fuerza para subir pendientes o transportar peso.
- Se puede usar para proyectos de velocidad, exploración, o robots todo-terreno.
- Aún es accesible para principiantes.
💲 Recomendación de chasis 4WD económico:
🔹 Chasis 4WD de acrílico genérico (para Arduino)
🛒 Precio: $35 USD.
📦 Contenido:
- Chasis acrílico doble piso.
- 4 motores DC 3–6V con reductora.
- 4 ruedas.
- Soporte para baterías.
- Tornillería.
❌ No incluye placa Arduino ni driver de motor.
✅ Muy usado en kits educativos.
🧠 Consejo:
Para controlar los 4 motores, necesitas un driver de doble puente H como el L298N o dos módulos L9110S. Si tienes una placa como Arduino UNO o ESP32, será totalmente compatible.
🤖 Proyectos educativos y prácticos con chasis 4WD
¡Genial! Un chasis 4WD es muy versátil y puede ser la base para una gran variedad de proyectos educativos, prácticos y hasta competitivos. Aquí tienes algunas ideas de proyectos donde puedes usar tu robot 4WD:
-
Robot seguidor de línea
- Usa sensores infrarrojos (IR) para seguir una línea negra sobre fondo blanco.
- Muy útil para aprender control PID y lógica de sensores.
- 🧠 Ideal para competencias escolares.
-
Robot Evitador de obstáculos
- Con sensores ultrasónicos (como el HC-SR04).
- Se mueve y cambia de dirección al detectar paredes u objetos.
- Puede usarse para exploración en interiores.
-
Control remoto por Bluetooth (desde celular)
- Con módulo HC-05 o HC-06.
- Controlas el robot usando una app como Arduino Bluetooth Controller.
- Aprendes a recibir y procesar comandos desde una app.
-
Control por Wi-Fi (ESP32 o ESP8266)
- Crea una interfaz web o app local.
- El robot responde por Wi-Fi a tus comandos (IoT básico).
- Ideal para aprender redes y control en tiempo real.
-
Robot con navegación autónoma
- Combina sensores ultrasónicos + brújula digital (HMC5883L) + encoders.
- El robot puede moverse por un entorno sin intervención.
- Inicia conceptos de robótica móvil avanzada.
-
Robot sigue luz
- Usa sensores LDR (resistencias foto-dependientes).
- El robot sigue una fuente de luz (como una linterna).
- Muy visual y llamativo para clases o ferias.
-
Vehículo rastreador GPS
- Agrega un módulo GPS (como NEO-6M) y SD Card para registrar recorridos.
- Perfecto para simular tareas de mapeo o logística.
-
Robot recolector o grúa
- Añade un brazo robótico encima del chasis.
- Puedes recoger objetos pequeños y transportarlos.
- Muy didáctico en temas de mecánica y control servo.
-
Robot controlado por gestos o voz
- Usa sensores como acelerómetros o reconocimiento de voz (VR Module).
- El robot reacciona a tus movimientos o comandos hablados.
🧠 Consejo para empezar:
Comienza con un proyecto sencillo con el Carro 4×4 Arduino como evitación de obstáculos o seguidor de línea, y luego ve agregando sensores, conectividad y autonomía.
🚧 Proyecto: Robot Evitador de obstáculos 4WD (Arduino)
🧰 Materiales necesarios
- chasis Carro 4×4 Arduino (4 motores DC).
- Arduino UNO + cable USB.
- Módulo L298N (driver de motor dual).
- Sensor ultrasónico HC-SR04.
- Jumpers (macho-macho).
- Batería (4xAA o 2×18650) y porta baterías.
🗂️ Esquema de conexión (resumen)
Módulo ultrasónico (HC-SR04)
- VCC → 5V de Arduino
- GND → GND
- TRIG → pin 9
- ECHO → pin 8
Módulo L298N
- IN1 → pin 2
- IN2 → pin 3
- IN3 → pin 4
- IN4 → pin 5
- ENA → puenteado o conectado al 5V para activar
- ENB → puenteado o conectado al 5V
- 12V → positivo del porta pilas
- GND → negativo del porta pilas y GND de Arduino
- 5V → (si quieres alimentar Arduino desde el L298N)
Motores DC
- Motor izquierdo → OUT1 y OUT2
- Motor derecho → OUT3 y OUT4
🧠 Diagrama de conexiones (esquemático)
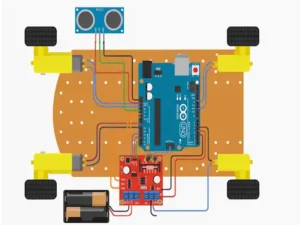
Esquemático Evitador de obstáculos
💻 Código Arduino básico (evita obstáculos)
// Pines para motores
int IN1 = 2;
int IN2 = 3;
int IN3 = 4;
int IN4 = 5;
// Pines para sensor ultrasónico
int trigPin = 9;
int echoPin = 8;
void setup() {
// Configurar pines de motores
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
// Sensor ultrasónico
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
Serial.begin(9600);
}
void loop() {
long duration;
int distance;
// Medir distancia
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distance = duration * 0.034 / 2;
Serial.print(“Distancia: “);
Serial.println(distance);
if (distance < 20) {
// Obstáculo cerca → retroceder y girar
retroceder();
delay(500);
girarDerecha();
delay(600);
} else {
// Avanzar si no hay obstáculo
avanzar();
}
delay(100);
}
// Funciones de movimiento
void avanzar() {
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
}
void retroceder() {
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
}
void girarDerecha() {
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
}
✅ ¿Qué hace este código?
- El robot mide la distancia al frente con el sensor ultrasónico.
- Si detecta un obstáculo a menos de 20 cm, retrocede y gira.
- Si el camino está libre, sigue avanzando.
Productos relacionados

Chasis Robótica